Custom Animatronic Puppet
Date:
Type:
Team Members:
Sponsor:
September 2025 - June 2026
Senior Project
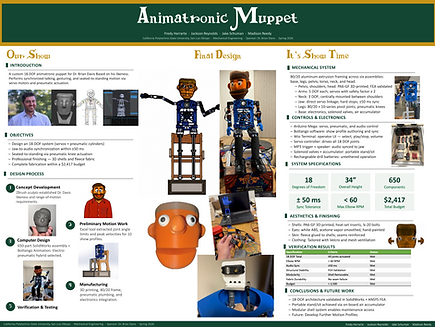
Fredy Herrarte, Jackson Reynolds, Jake Schuman, and Madison Reedy
Dr. Brian Davis;
Cal Poly Mechanical Engineering Department and Cal Poly's ME Discretionary-Fund Allocation Committee (MEDAC)
This senior project focuses on the design and construction of a custom 18-degree-of-freedom audio-animatronic puppet capable of standing from a seated position. The system combines servo- and actuator-driven mechanisms for expressive facial and upper-body motion with pneumatic leg actuation to provide the force required for standing. Mechanical systems are designed in SolidWorks, character forms are digitally sculpted in ZBrush, and motion is programmed using Bottango. The animatronic integrates aluminum and 3D-printed components and is controlled via an Arduino-based system, emphasizing durability, expressiveness, and production-ready performance.
Special thanks to our mentors from:



Concept Art
Developed initial concept artwork to translate Dr. Brian Davis into an animatronic character in his chosen puppetry-inspired art style, establishing proportions, personality, and visual language.



Model Making
Created physical and digital models to study form, scale, and construction feasibility prior to full mechanical integration.








Drawing Package
This drawing package highlights technical drawings created in SolidWorks for a custom audio-animatronic system, focusing on mechanical integration, mounting features, and assembly. CAD modeling was completed in SolidWorks, while ZBrush was used for sculpting the character shells. Together, these tools supported the translation of expressive character design into precise, manufacturable components.
Mechanical CAD
Designed and refined internal mechanical systems in SolidWorks, including actuation layouts, linkages, and structural components to support expressive motion. Focused on integrating servo-driven mechanisms with the overall structure, ensuring proper range of motion, load distribution, and alignment with external shell geometry. Iterated on designs to balance performance, durability, and manufacturability while maintaining accessibility for assembly, maintenance, and future modifications.


Manufacturing
Fabricated and assembled the animatronic system using a combination of digital fabrication and mechanical construction techniques. Structural components were built using 80/20 aluminum framing, while custom parts were produced through 3D printing to house and integrate servo-driven mechanisms. Standard fasteners, including 1/4-20 and M3 screws, were used throughout to ensure modularity, strength, and ease of assembly.
A custom electronics enclosure was designed and laser cut, with files created in Adobe Illustrator to translate design intent into precise manufacturing outputs. Additionally, a project logo was developed and incorporated into the laser-cut components, blending branding with fabrication.






Controls Systems
Developed the electronic control architecture for the animatronic system, integrating servo motors, pneumatic actuation, and Arduino-based control hardware to coordinate expressive movement and standing functionality. Programmed and tested motion sequences in Bottango while designing wiring layouts and power distribution systems to support reliable, modular operation and future system expansion.

Motion Programming
Programmed and tested character performances using Bottango, synchronizing motion with over 20 minutes of voice recordings provided by the project sponsor. To develop realistic timing and movement dynamics, team members performed and recorded reference motions while listening to the audio tracks. These references were used to create expressive animation profiles that were then programmed and refined for the final character.

Creating the Shells - CAD
Sculpted the character’s shell geometry in ZBrush and imported the models into SolidWorks for mechanical integration. Internal mounting features, structural reinforcements, and interfaces for animatronic mechanisms were incorporated into the designs. Shells were segmented into printable sections and designed for assembly using heat-set inserts and M3 fasteners, enabling precise alignment, durability, and ease of maintenance.













Creating the Shells – 3D Printing & Prototyping
Produced multiple prototype iterations to evaluate scale, assembly methods, and overall usability while incorporating feedback from the project sponsor. Test prints were used to verify fit, ergonomics, and integration with internal mechanisms before final fabrication. Final shell components were manufactured using glass-fiber-reinforced PA6 nylon for strength and durability, while the eyes were printed in ABS to support post-processing and finishing.












Creating the Shells - Figure Finishing
Applied fleece coverings to the printed shell components, sewing all edges to reinforce seams and prevent fraying before bonding the fabric with E6000 adhesive. Foam was used to create the character’s hair profile, while the ears incorporated air-dry clay to achieve the desired shape and contours. The hands were filled with polyfill to function as removable glove-style components. The ABS eyes were smoothed in an acetone vapor chamber and hand-painted to achieve a polished, expressive appearance. Fabric samples and finishing techniques were tested throughout development to refine the final aesthetic and construction methods.






Fabric and Clothing Design
Designed and fabricated custom fabric elements and clothing for the animatronic, balancing aesthetics, durability, and range of motion while ensuring compatibility with underlying mechanical systems.




Testing & Validation
Validated the animatronic through functional testing of all 18 degrees of freedom, including facial animation, upper-body articulation, audio synchronization, and pneumatic standing performance. Motion profiles were refined through iterative testing to improve timing, reliability, and character expressiveness while ensuring safe and repeatable operation.
Project Outcome
Successfully designed, fabricated, programmed, and demonstrated a fully functional 18-degree-of-freedom audio-animatronic puppet capable of expressive motion and seated-to-standing operation. The project combined mechanical design, controls, manufacturing, programming, and artistic fabrication into a single integrated system while meeting performance, budget, and sponsor expectations.








Cal Poly 2026 Mechanical Engineering
Senior Expo
The completed animatronic was showcased at the Cal Poly Senior Project Expo on May 29, 2026. During the event, the character was displayed in its standing configuration and operated continuously for attendees, industry representatives, faculty, and students. A remotely located air compressor supplied the pneumatic system, allowing reliable operation while minimizing noise in the exhibit space.
The project received significant attention throughout the event, attracting visitors from across the expo and generating interest from numerous companies and industry professionals. Most importantly, Dr. Brian Davis was thrilled with the final result, marking a successful culmination of the project team's design, manufacturing, controls, and artistic efforts.
 |  |  |
|---|---|---|
 |  |  |
 |  |  |